|
第9集 数码管,已手敲代码,测试通过 任务一:AI8051U实验箱数码管静态的显示一个数字 (1)代码编译图: (2)程序代码: #include "io.h" u8 SEG_MUM[]= { 0x3F, /*'0', 0*/ 0x06, /*'1', 1*/ 0x5B, /*'2', 2*/ 0x4F, /*'3', 3*/ 0x66, /*'4', 4*/ 0x6D, /*'5', 5*/ 0x7D, /*'6', 6*/ 0x07, /*'7', 7*/ 0x7F, /*'8', 8*/ 0x6F, /*'9', 9*/ 0x77, /*'A', 10*/ 0x7C, /*'B', 11*/ 0x39, /*'C', 12*/ 0x5E, /*'D', 13*/ 0x79, /*'E', 14*/ 0x71, /*'F', 15*/ 0x40, /*'-', 16*/ 0x00, /*' ', 17*/ 0x80, /*'.', 18*/ }; u8 State1=0; //LED1初始状态 u8 State2=0; //LED2初始状态 u8 State3=0; //LED3初始状态 u16 Key_Vol = 0; void LED0_Blink(void) { State1 = !State1; P00 = State1; } void LED1_Blink(void) { State2 = !State2; P01 = State2; } void LED2_Blink(void) { State3 = !State3; P02 = State3; } void KEY_Task(void) { } void init_595(void) { HC595_SER = 0; HC595_RCK = 0; HC595_SCK = 0; } void Send_595( u8 dat) { u8 i; for(i=0;i<8;i++) { dat <<=1; HC595_SER = CY; HC595_SCK = 1; HC595_SCK = 0; } } void Display_Seg(u8 HC595_1, u8 HC595_2) { Send_595(HC595_1); Send_595(HC595_2);
HC595_RCK = 1; HC595_RCK = 0; } void Seg_task(void) { Display_Seg( SEG_MUM[0],0xfe); } 任务二:AI8051U实验箱数码管显示“12345678”
(1)代码编译: (2)程序代码: #include "io.h"
u8 SEG_MUM[]= { 0x3F, /*'0', 0*/ 0x06, /*'1', 1*/ 0x5B, /*'2', 2*/ 0x4F, /*'3', 3*/ 0x66, /*'4', 4*/ 0x6D, /*'5', 5*/ 0x7D, /*'6', 6*/ 0x07, /*'7', 7*/ 0x7F, /*'8', 8*/ 0x6F, /*'9', 9*/ 0x77, /*'A', 10*/ 0x7C, /*'B', 11*/ 0x39, /*'C', 12*/ 0x5E, /*'D', 13*/ 0x79, /*'E', 14*/ 0x71, /*'F', 15*/ 0x40, /*'-', 16*/ 0x00, /*' ', 17*/ 0x80, /*'.', 18*/ }; u8 State1=0; //LED1初始状态 u8 State2=0; //LED2初始状态 u8 State3=0; //LED3初始状态 u16 Key_Vol = 0; void LED0_Blink(void) { State1 = !State1; P00 = State1; }
void LED1_Blink(void) { State2 = !State2; P01 = State2; }
void LED2_Blink(void) { State3 = !State3; P02 = State3; } void KEY_Task(void) {
} void init_595(void) { HC595_SER = 0; HC595_RCK = 0; HC595_SCK = 0; } void Send_595( u8 dat) { u8 i; for(i=0;i<8;i++) { dat <<=1; HC595_SER = CY; HC595_SCK = 1; HC595_SCK = 0; } } void Display_Seg(u8 HC595_1, u8 HC595_2) { Send_595(HC595_1); Send_595(HC595_2);
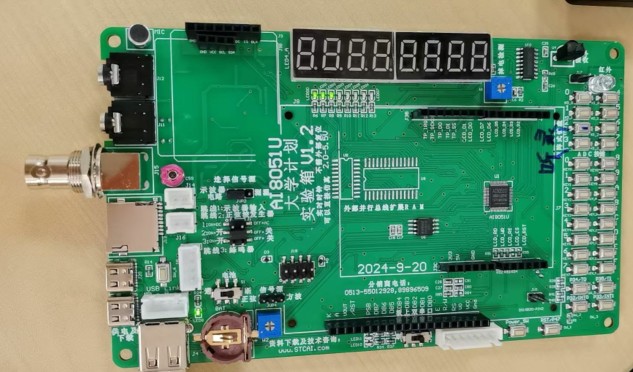
HC595_RCK = 1; HC595_RCK = 0; } void Seg_task(void) { Display_Seg( SEG_MUM[0],0xfe); } (3)学习视频:
任务三:AI8051U实验箱数码管显示“00-00-00”分别代表时分秒 (1)代码编译: (2)主程序代码: #include "io.h" u8 SEG_MUM[]= { 0x3F, /*'0', 0*/ 0x06, /*'1', 1*/ 0x5B, /*'2', 2*/ 0x4F, /*'3', 3*/ 0x66, /*'4', 4*/ 0x6D, /*'5', 5*/ 0x7D, /*'6', 6*/ 0x07, /*'7', 7*/ 0x7F, /*'8', 8*/ 0x6F, /*'9', 9*/ 0x77, /*'A', 10*/ 0x7C, /*'B', 11*/ 0x39, /*'C', 12*/ 0x5E, /*'D', 13*/ 0x79, /*'E', 14*/ 0x71, /*'F', 15*/ 0x40, /*'-', 16*/ 0x00, /*' ', 17*/ 0x80, /*'.', 18*/ }; u8 T_MUM[8]= { 0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80 }; u8 State1=0; //LED1初始状态 u8 State2=0; //LED2初始状态 u8 State3=0; //LED3初始状态 u16 Key_Vol = 0; void LED0_Blink(void) { State1 = !State1; P00 = State1; } void LED1_Blink(void) { State2 = !State2; P01 = State2; } void LED2_Blink(void) { State3 = !State3; P02 = State3; } void KEY_Task(void) {
} void init_595(void) { HC595_SER = 0; HC595_RCK = 0; HC595_SCK = 0; } void Send_595( u8 dat) { u8 i; for(i=0;i<8;i++) { dat <<=1; HC595_SER = CY; HC595_SCK = 1; HC595_SCK = 0; } } void Display_Seg(u8 HC595_1, u8 HC595_2) { Send_595(HC595_1); Send_595(HC595_2);
HC595_RCK = 1; HC595_RCK = 0; } u8 Seg_no = 0; u8 shi =0; u8 fen =0; u8 miao =0;
void Seg_task(void) { u8 num = 0; if(Seg_no==0) { num = shi/10; Display_Seg( SEG_MUM[num] , ~T_MUM[0]); //数码管刷新断码和位码 } else if(Seg_no==1) { num = shi%10; Display_Seg( SEG_MUM[num] , ~T_MUM[1]); //数码管刷新断码和位码 } else if(Seg_no==2) { Display_Seg( SEG_MUM[16] , ~T_MUM[2]); //数码管刷新断码和位码 }
else if(Seg_no==3) { num = fen/10; Display_Seg( SEG_MUM[num] , ~T_MUM[3]); //数码管刷新断码和位码 } else if(Seg_no==4) { num = fen%10; Display_Seg( SEG_MUM[num] , ~T_MUM[4]); //数码管刷新断码和位码 } else if(Seg_no==5) { Display_Seg( SEG_MUM[16] , ~T_MUM[5]); //数码管刷新断码和位码 }
else if(Seg_no==6) { num = miao/10; Display_Seg( SEG_MUM[num] , ~T_MUM[6]); //数码管刷新断码和位码 } else if(Seg_no==7) { num = miao%10; Display_Seg( SEG_MUM[num] , ~T_MUM[7]); //数码管刷新断码和位码 } else {
}
Seg_no ++; if(Seg_no>7) Seg_no=0; } void TIMECOUNT_task(void) { miao ++; if(miao>59) { miao = 0; fen++; if(fen>59) { fen = 0; shi ++; if(shi>23) shi = 0; } }
} (3)学习视频:
任务四:擎天柱,虚拟显示——LED和数码管 (1)代码编译及效果图:
(2)主程序代码 #include "io.h"
u8 SEG_NUM[]= { 0x3F, /*'0', 0*/ 0x06, /*'1', 1*/ 0x5B, /*'2', 2*/ 0x4F, /*'3', 3*/ 0x66, /*'4', 4*/ 0x6D, /*'5', 5*/ 0x7D, /*'6', 6*/ 0x07, /*'7', 7*/ 0x7F, /*'8', 8*/ 0x6F, /*'9', 9*/ 0x77, /*'A', 10*/ 0x7C, /*'B', 11*/ 0x39, /*'C', 12*/ 0x5E, /*'D', 13*/ 0x79, /*'E', 14*/ 0x71, /*'F', 15*/ 0x40, /*'-', 16*/ 0x00, /*' ', 17*/ 0x80, /*'.', 18*/ }; u8 T_NUM[8]= { 0X01,0X02,0X04,0X08,0X10,0X20,0X40,0X80 };
u8 State1 = 0; //LED1初始状态 u8 State2 = 0; //LED2初始状态 u8 State3 = 0; //LED3初始状态 u16 Key_Vol=0; void LED0_Blink(void) { State1 = !State1; P00 = State1; } void LED1_Blink(void) { State2 = !State2; P01 = State2; } void LED2_Blink(void) { State3 = !State3; P02 = State3; } void KEY_Task(void) {
} void Init_595(void) { HC595_SER =0; HC595_RCK =0; HC595_SCK =0; } void Send_595(u8 dat) { u8 i;
for(i=0;i<8;i++) { dat <<=1; //DAT=(DAT<<1); //CY HC595_SER= CY; //先把数据写到引脚上 HC595_SCK = 1; //输出上升沿的时钟信号 HC595_SCK = 0; } } void Display_Seg(u8 HC595_1,u8 HC595_2) Send_595(HC595_1); //数码管段码输出 高电平点亮
Send_595(HC595_2); //数码管位码输出 低电平点亮 HC595_RCK = 1; //数据输出 HC595_RCK = 0; } u8 Seg_no=0; u8 shi =0; u8 fen =0; u8 miao =0; void Seg_Task(void) { u8 num=0; if(Seg_no==0) //小时十位 { num=shi/10; Display_Seg(SEG_NUM[num],~T_NUM[0]); //数码管刷新段码和位码 } else if(Seg_no==1) //小时个位 { num=shi%10; Display_Seg(SEG_NUM[num],~T_NUM[1]); //数码管刷新段码和位码 } else if(Seg_no==2) //第一个横杠 { Display_Seg(SEG_NUM[16],~T_NUM[2]); //数码管刷新段码和位码 } else if(Seg_no==3) //分钟十位 { num=fen/10; Display_Seg(SEG_NUM[num],~T_NUM[3]); //数码管刷新段码和位码 } else if(Seg_no==4) //分钟个位 { num=fen%10; Display_Seg(SEG_NUM[num],~T_NUM[4]); //数码管刷新段码和位码 } else if(Seg_no==5) //第二个横杠 { Display_Seg(SEG_NUM[16],~T_NUM[5]); //数码管刷新段码和位码 } else if(Seg_no==6) //秒钟十位 { num=miao/10; Display_Seg(SEG_NUM[num],~T_NUM[6]); //数码管刷新段码和位码 } else if(Seg_no==7) //秒钟个位 { num=miao%10; Display_Seg(SEG_NUM[num],~T_NUM[7]); //数码管刷新段码和位码 } else {
} Seg_no ++; if(Seg_no>7) Seg_no=0; } void TIMECOUNT_Task(void) { miao++; if(miao>59) { miao=0; fen++; if(fen>59) { fen=0; shi++; if(shi>23) shi=0; } } } u8 state_now=0; void PLED_40(void) { u8 cod[8]; cod[0]=0x0f; //表示开启P0-P3 cod[1]=0x01; //P0端口 cod[2]=0x01; //P1 cod[3]=~T_NUM[state_now]; //P2 cod[4]=0x01; //P3 LED40_SendData(cod,5);
P2 = ~T_NUM[state_now];
state_now++; if(state_now>7) state_now=0;
} void SEG_PC(void) { u8 cod[8];
cod[0]=SEG_NUM[shi/10]; //小时的十位数数码管段码 cod[1]=SEG_NUM[shi%10]; cod[2]=SEG_NUM[16]; //数码管刷新段码和位码
cod[3]=SEG_NUM[fen/10]; //分钟 cod[4]=SEG_NUM[fen%10]; cod[5]=SEG_NUM[16]; //数码管刷新段码和位码
cod[6]=SEG_NUM[miao/10]; //秒钟 cod[7]=SEG_NUM[miao%10];
SEG7_ShowCode(cod); } (3)学习视频:
|
 |手机版|深圳国芯人工智能有限公司
( 粤ICP备2022108929号-2 )
|手机版|深圳国芯人工智能有限公司
( 粤ICP备2022108929号-2 )

 发表于 2024-11-29 13:47:43
发表于 2024-11-29 13:47:43



























 已绑定手机
已绑定手机 发表于 2025-1-14 14:38:49
发表于 2025-1-14 14:38:49
